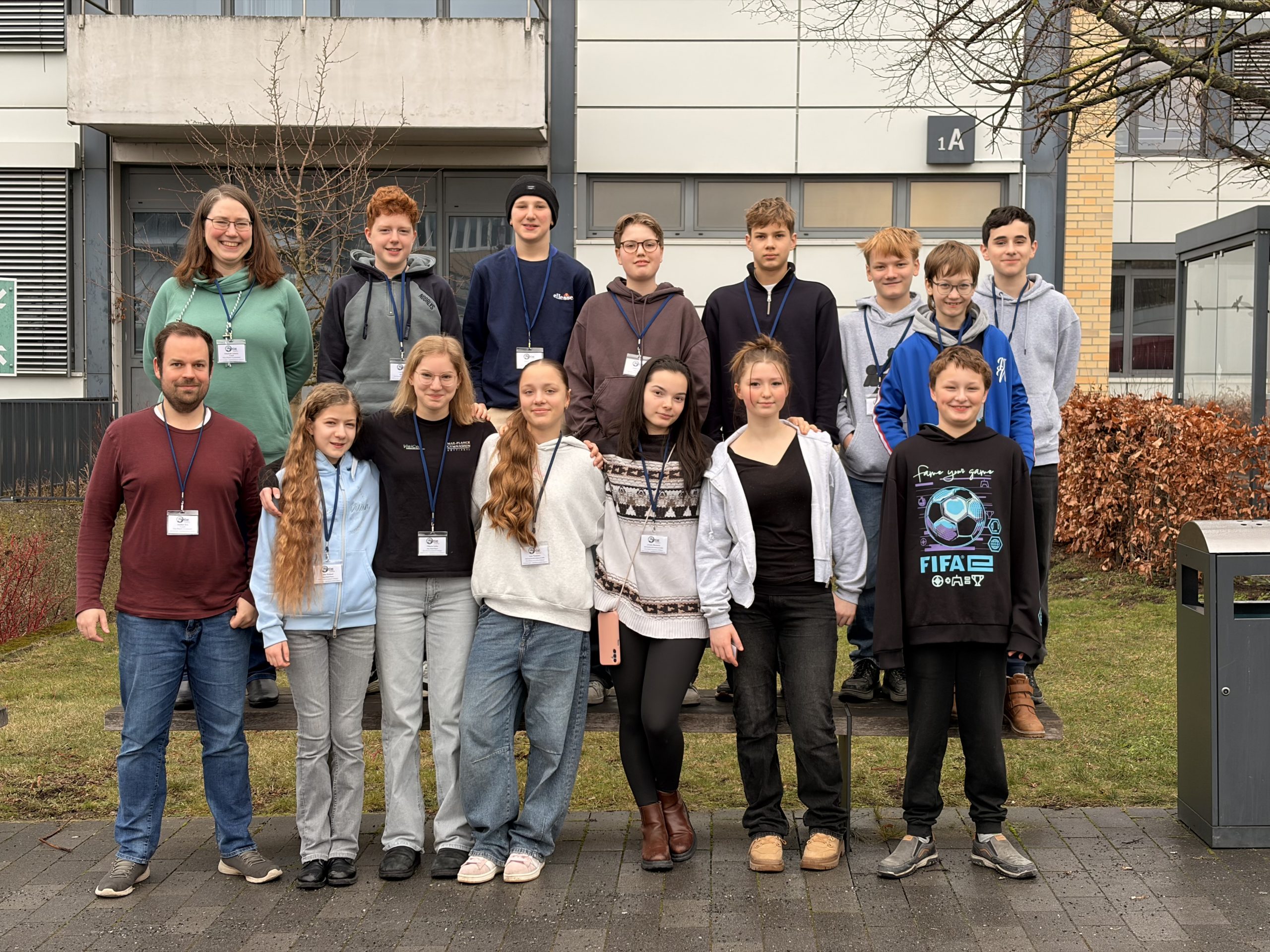
Vom 9. bis 11. Februar nahm die Fortgeschrittenen Robotik-AG am RoboCup in Hannover teil – und kehrte mit herausragenden Ergebnissen zurück. Drei Tage lang wurde programmiert, getestet, gezittert und gefeiert. Die Wettbewerbe waren spannend bis zum Schluss, die Abstände zwischen den Teams teilweise minimal.
Insgesamt traten 13 Schülerinnen und Schüler unserer AG mit sechs Teams an. Vier Teams starteten in der Disziplin Line, zwei weitere in Line Entry. Begleitet wurden sie von Frau Lüdecke und Herrn Birk.
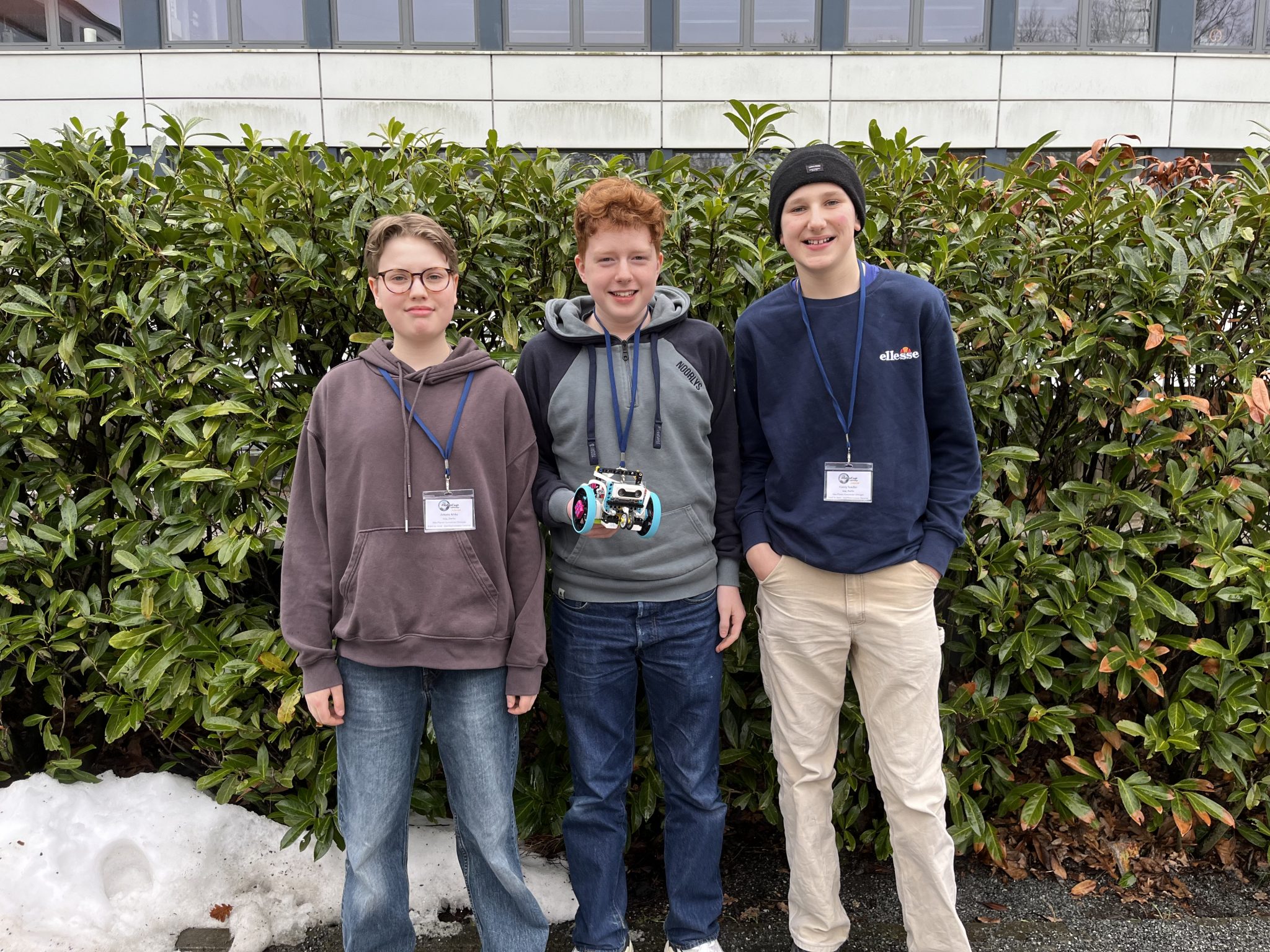
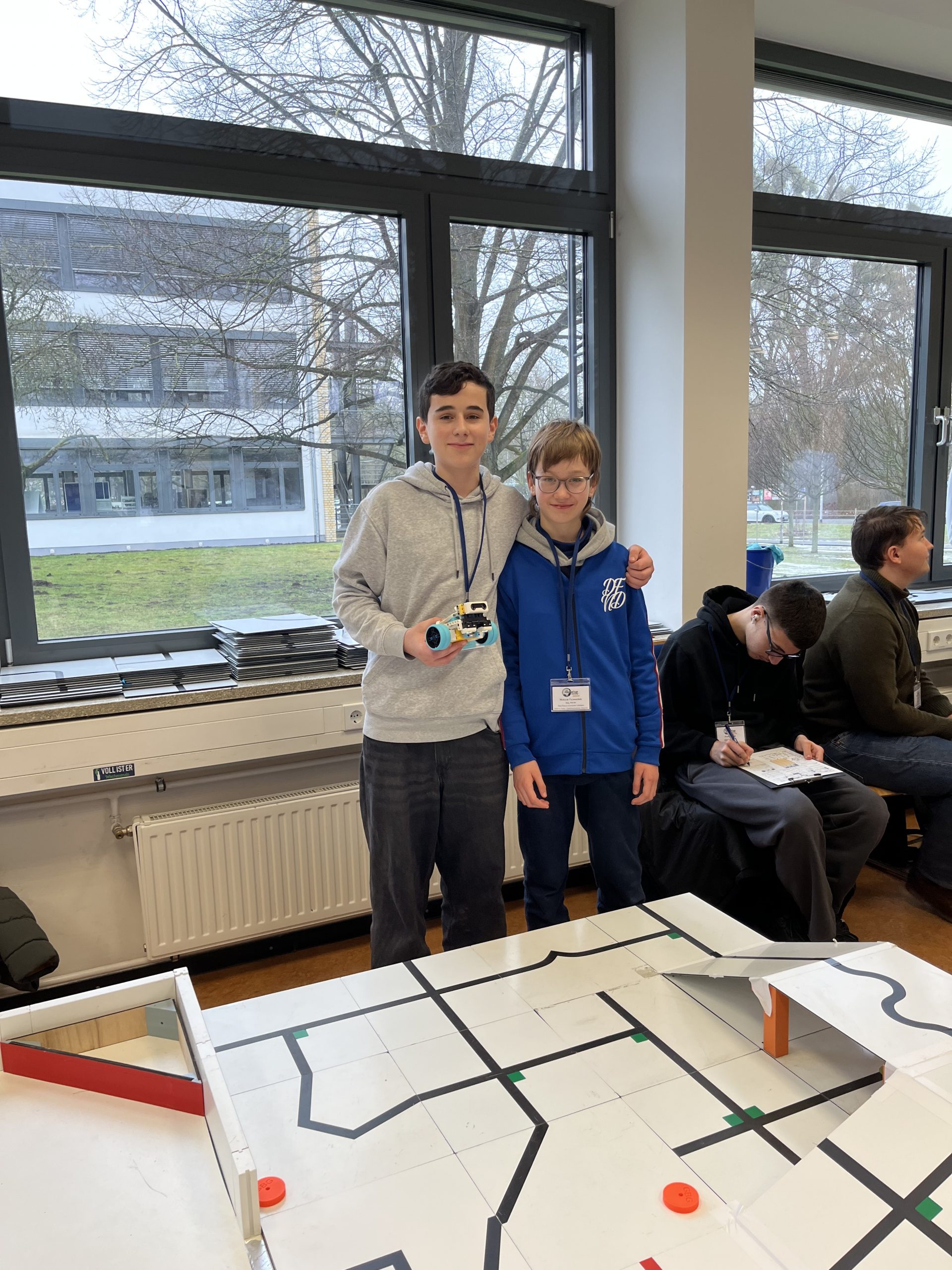
Team Haribo
Team DasTeamDasMirAmBestenGefällt
Starke Platzierungen
Besonders erfolgreich waren zwei unserer Teams: Das Team „DasTeamDasMirAmBestenGefällt“ aus dem 8. Jahrgang erreichte einen hervorragenden 4. Platz unter 21 teilnehmenden Teams in der Disziplin Line.
Das Team „Haribo“ aus dem 9. Jahrgang erzielte sogar einen beeindruckenden 2. Platz – eine Spitzenleistung in einem hochklassigen Teilnehmerfeld.
Damit qualifizierten sich beide Teams für das Deutschlandfinale in Köln im März.
Herzlichen Glückwunsch an alle Beteiligten zu diesem Erfolg!
Worum geht es beim RoboCup?
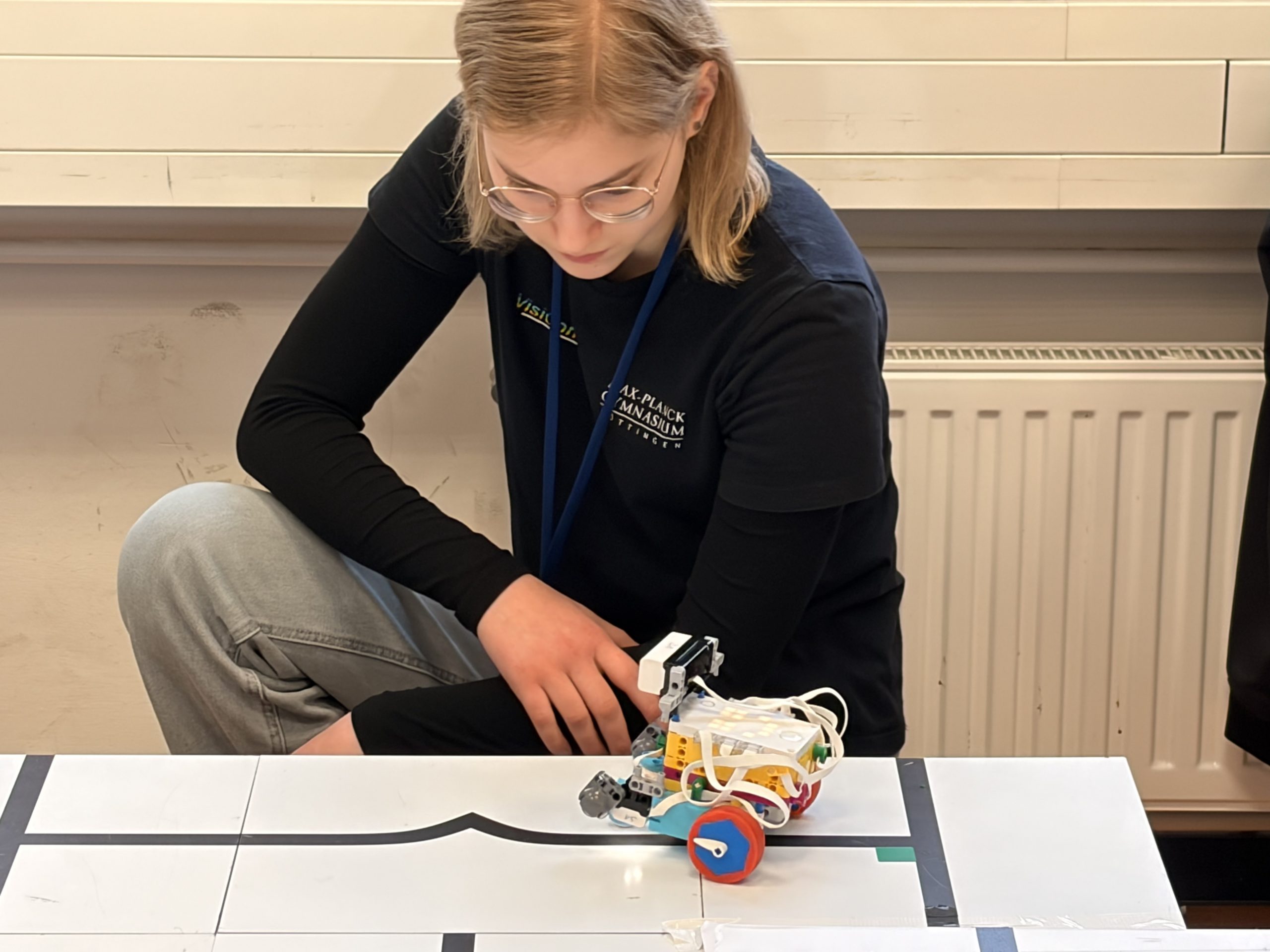
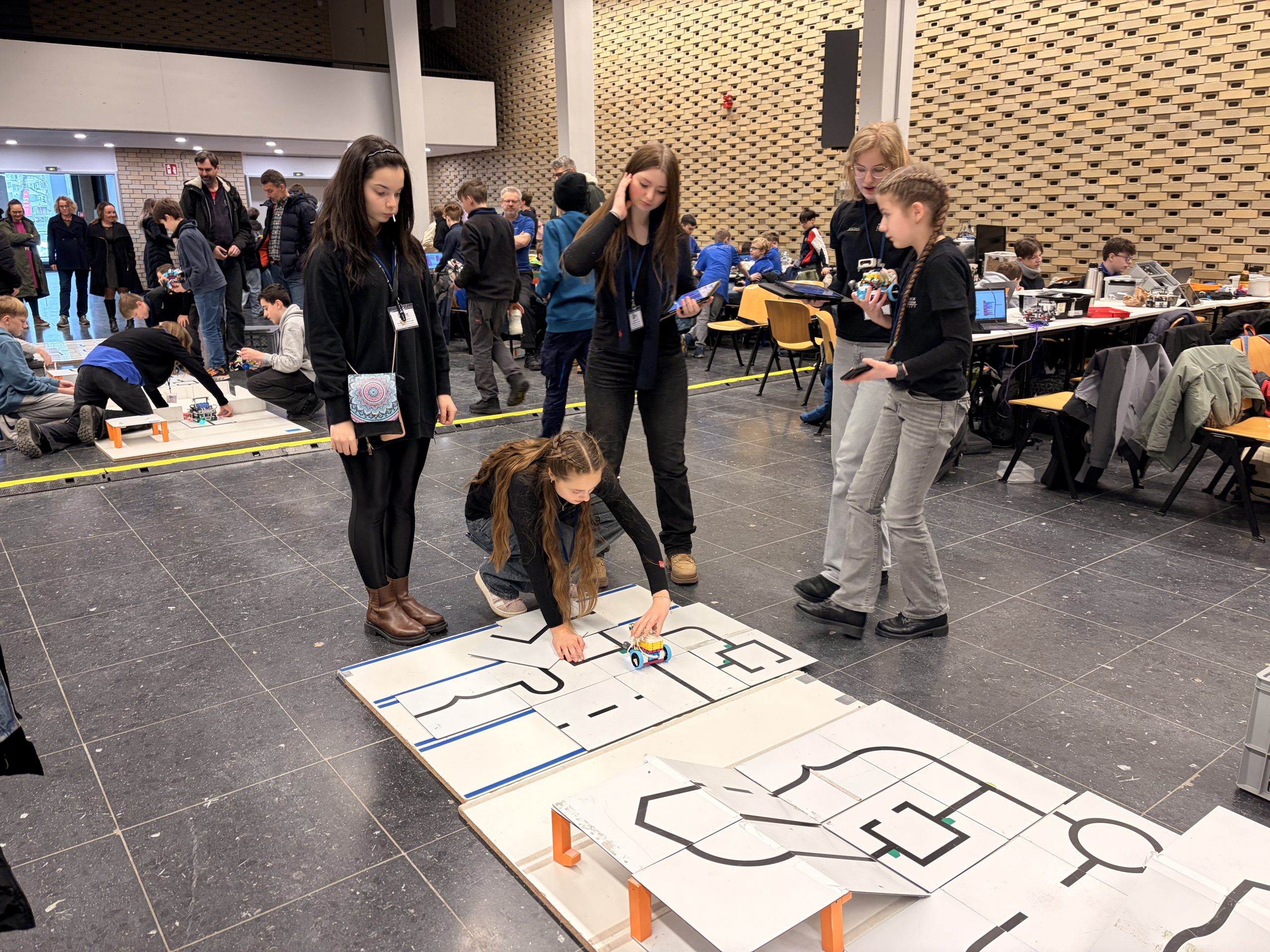
Der RoboCup Junior ist ein internationaler Robotikwettbewerb für Schülerinnen und Schüler. Ziel ist es, eigenständig entwickelte Roboter so zu programmieren, dass sie komplexe Aufgaben möglichst zuverlässig und präzise bewältigen.
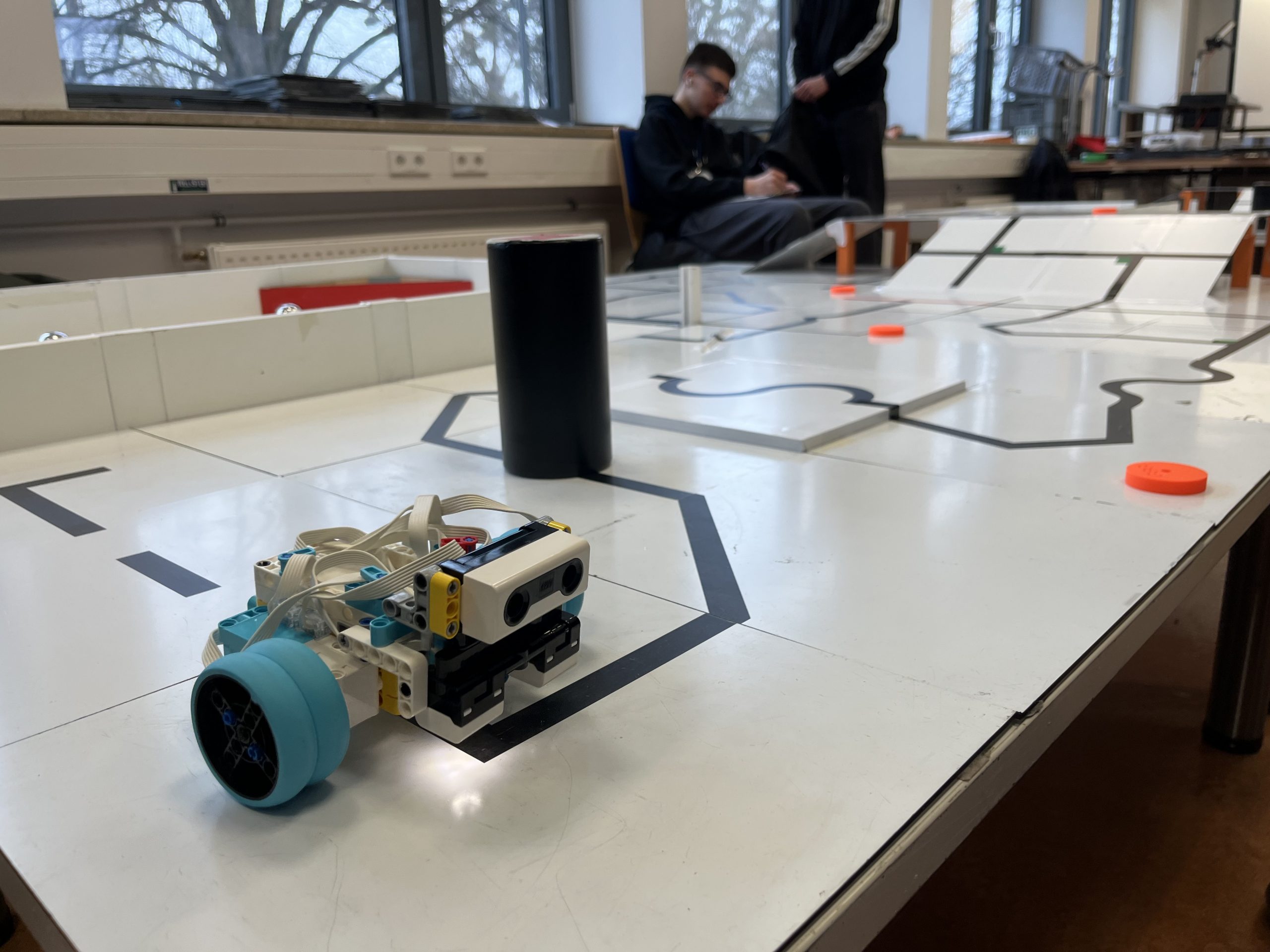
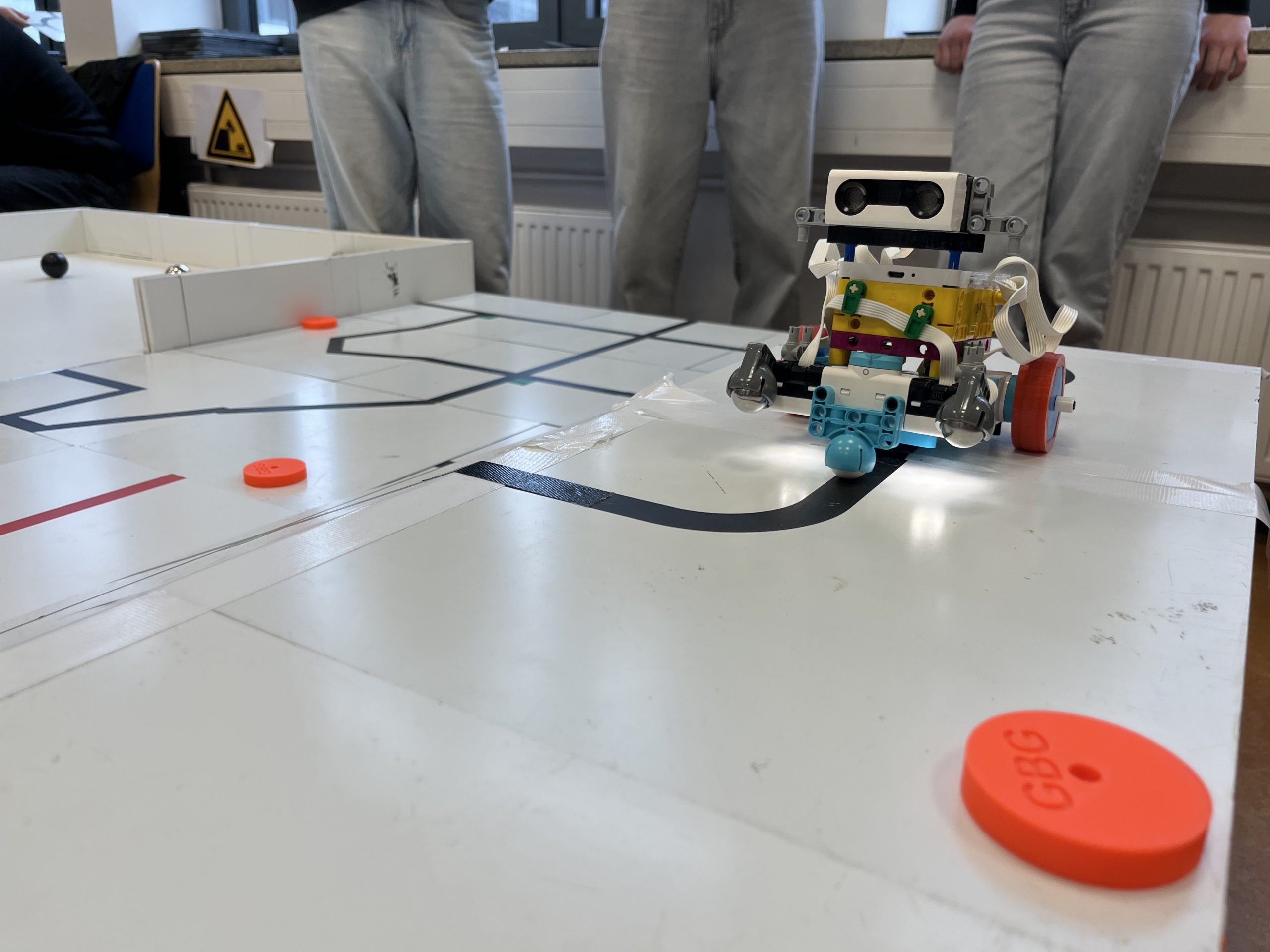
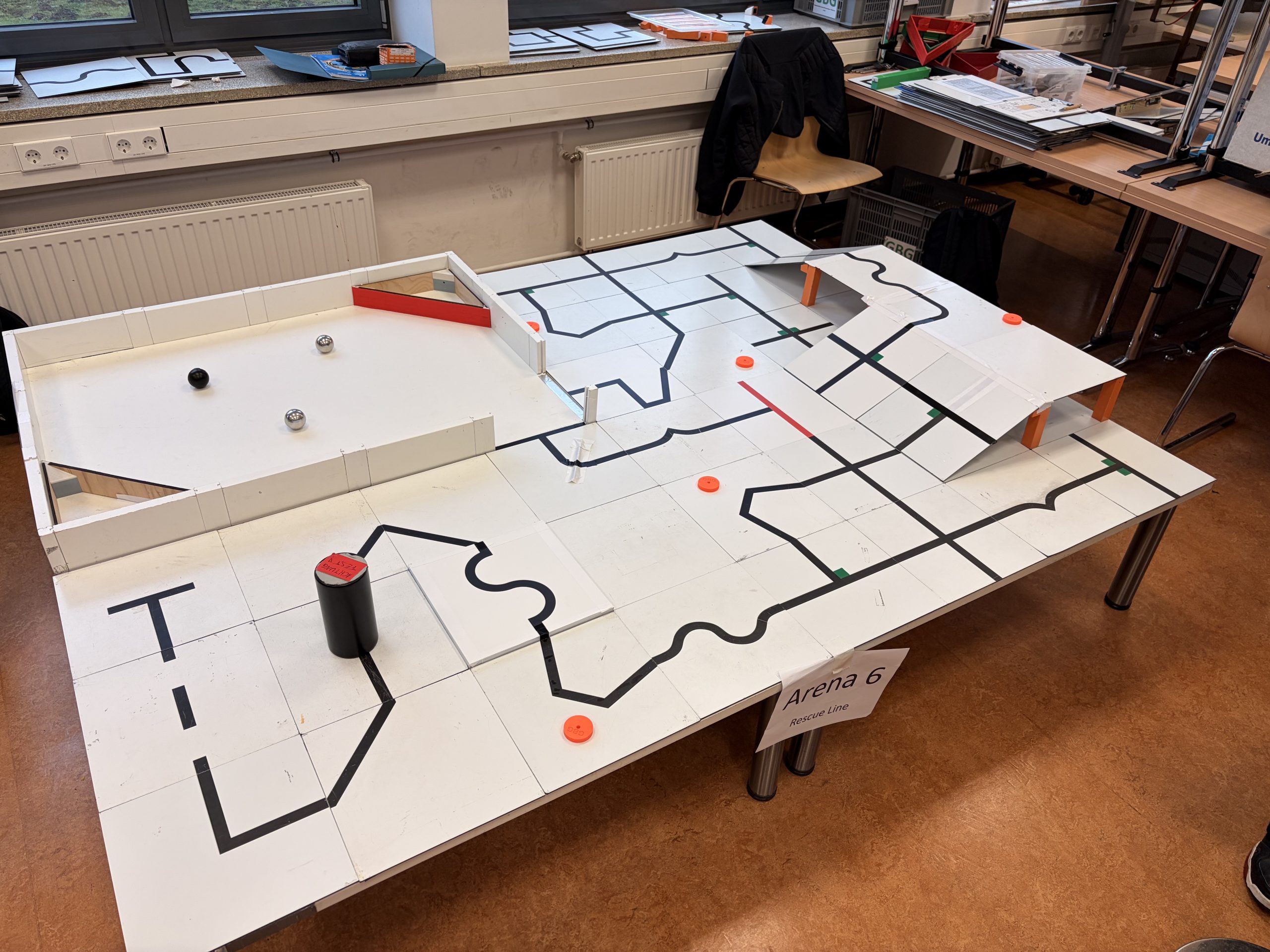
In der Disziplin Line müssen Roboter:
einer schwarzen Linie auf weißem Untergrund folgen scharfe Kurven und Unterbrechungen erkennen
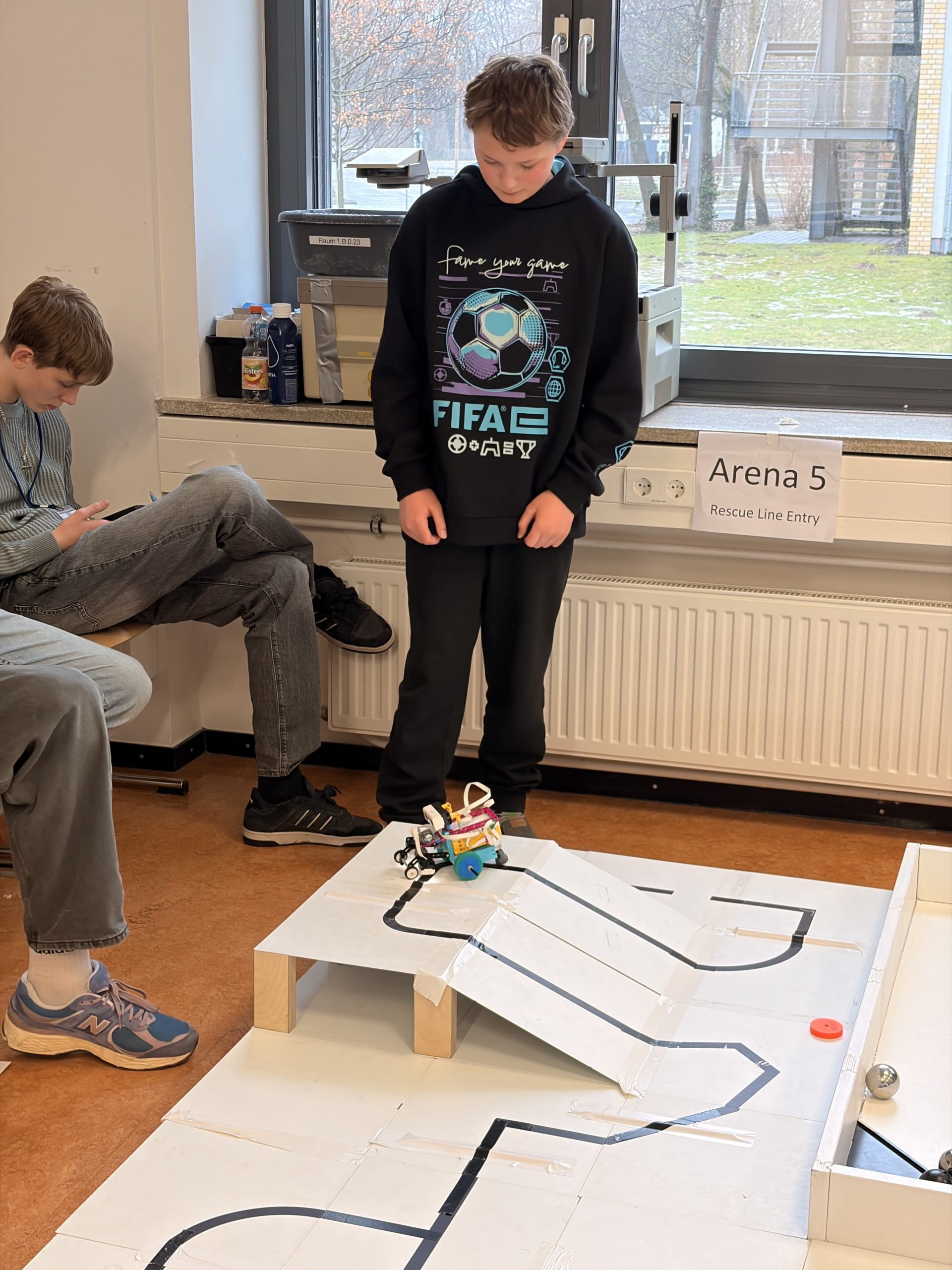
Rampen (Steigungen und Gefälle) überwinden
Hindernissen ausweichen
Kreuzungen korrekt interpretieren
auf wechselnde Lichtverhältnisse reagieren
Die Variante Line Entry ist eine Einstiegskategorie mit vereinfachten Anforderungen, die jedoch ebenfalls präzise Sensorik und stabile Programmierung erfordert.
Entscheidend sind nicht nur Geschwindigkeit, sondern vor allem Zuverlässigkeit, saubere Sensor-Auswertung, strategisches Programmieren und mechanische Stabilität. Schon kleine Fehler – ein falsch kalibrierter Sensor oder eine minimal zu hohe Geschwindigkeit – können über Platzierungen entscheiden.